

u 采用先进的伺服控制技术;
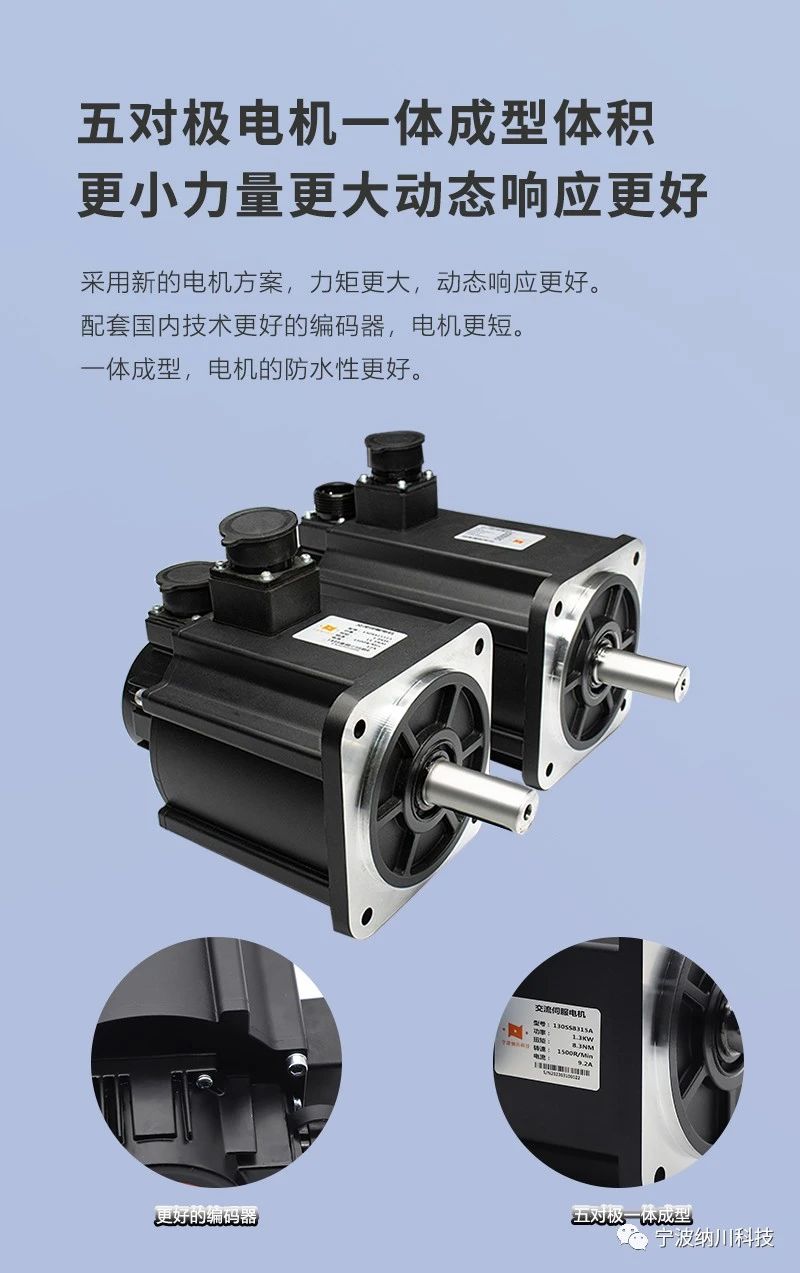
u 采用了高度集成方案,实现了更小体积;
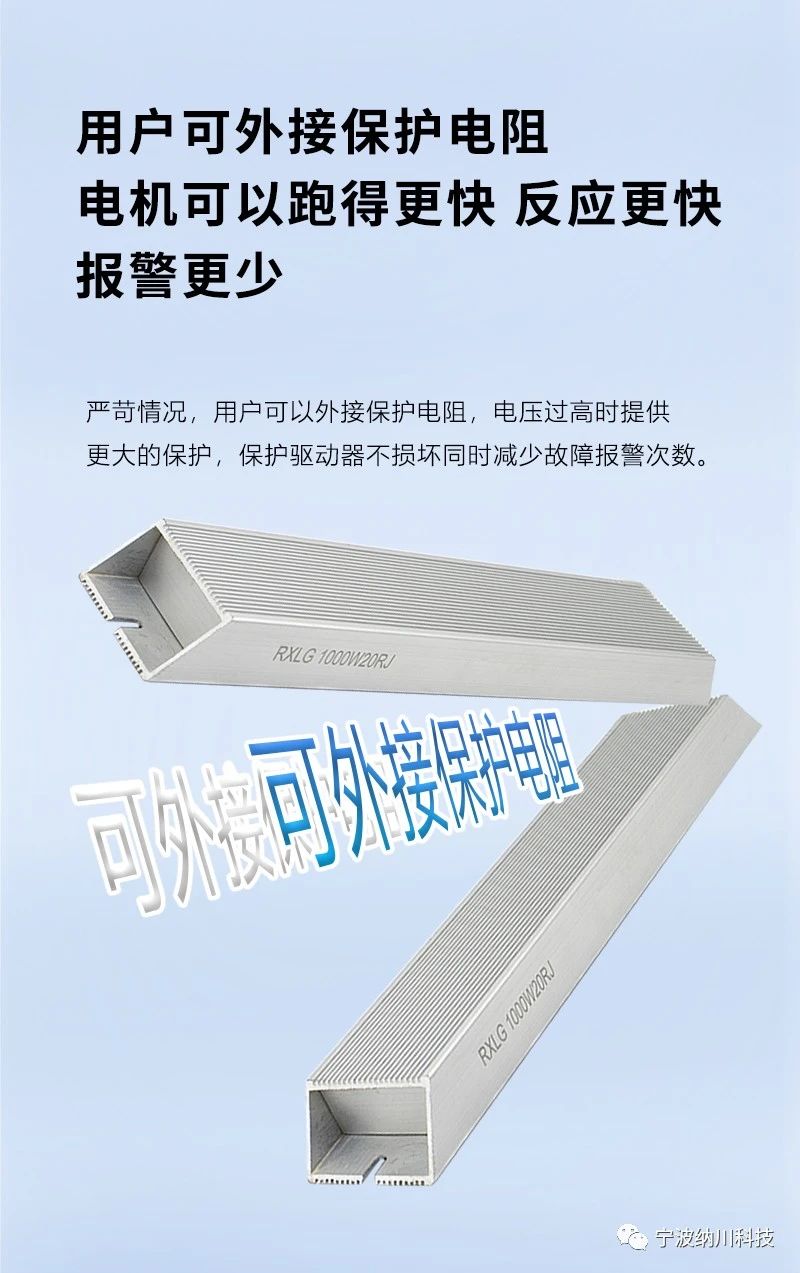
u 自带泄放电阻,集成了动态制动功能,适用于更多行业;
u 具备软件滤波和硬件滤波,抗高频干扰能力大大增强;
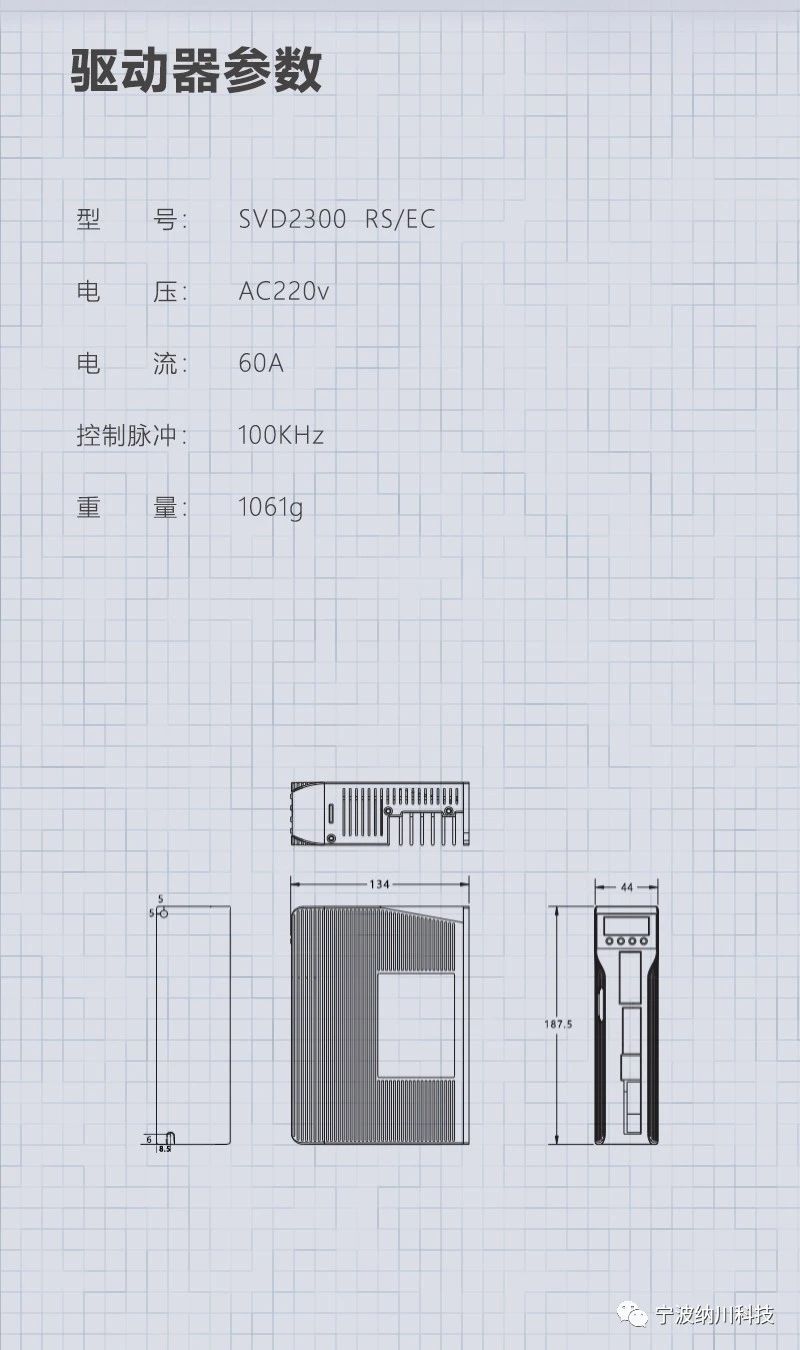
u 支持单相或三相220V交流输入,大大降低接线要求;
u 具有数码屏幕,无需连接PC即可离线修改驱动器参数;
u 支持ModBus通讯协议,支持速度控制模式和力矩控制模式。
u 采用先进的伺服控制技术;
u 采用了高度集成方案,实现了更小体积;
u 自带泄放电阻,集成了动态制动功能,适用于更多行业;
u 具备软件滤波和硬件滤波,抗高频干扰能力大大增强;
u 支持单相或三相220V交流输入,大大降低接线要求;
u 具有数码屏幕,无需连接PC即可离线修改驱动器参数;
u 支持ModBus通讯协议,支持速度控制模式和力矩控制模式。





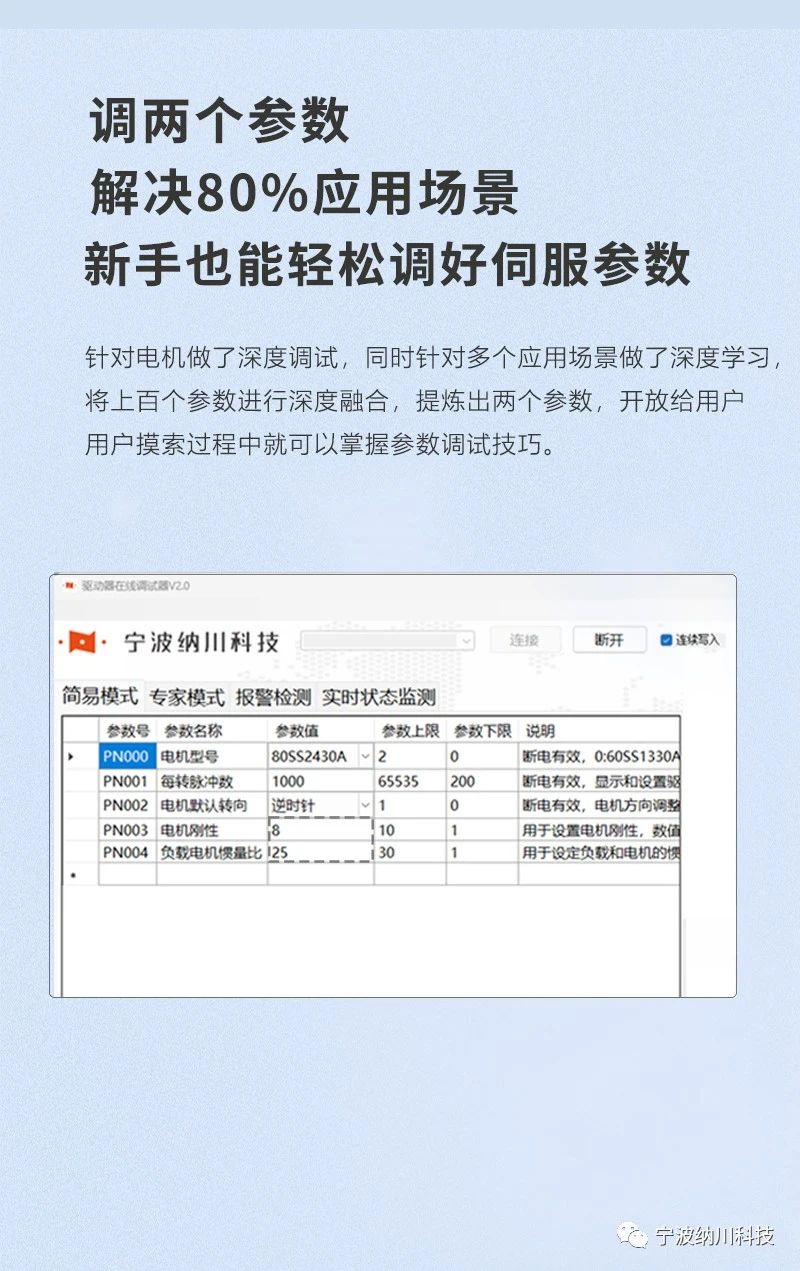










|
参数序号 |
参数名称 |
参数值 |
参数范围 |
说明 |
|
Pn000 |
电机型号 |
14615 |
5415A 14615 |
5415A: 830W伺服电机 14615: 2300W伺服电机 |
|
Pn001 |
每转脉冲数 |
1000 |
200-65535 |
电机每转一圈需要的脉冲数 |
|
Pn002 |
电机默认转向 |
0 |
0~1 |
0:正转 1:反转 |
|
Pn003 |
电机刚性 |
5 |
1~10 |
用于设置电机刚性 |
|
Pn004 |
惯量比 |
5 |
1~30 |
用于设置负载电机惯量比 |
|
Pn005 |
位置环Kp |
7 |
1~100 |
用于位置PID设定 |
|
Pn006 |
位置前馈 |
0 |
0~500 |
用于位置PID设定 |
|
Pn007 |
电流滤波器 |
20 |
0~65535 |
用于电流滤波 |
|
Pn008 |
速度滤波器 |
100 |
0~65535 |
用于速度滤波 |
|
Pn009 |
滤波平滑时间 |
0 |
0~65535 |
单位:us 指令到位时间,设置后注意到位可能有少许延迟 |
|
Pn010 |
使能控制信号极性选择 |
1 |
0~1 |
0:高电平 1:低电平 |
|
Pn011 |
故障输出极性选择 |
1 |
0~1 |
0:低电平 1:高电平 |
|
Pn012 |
脉冲输入模式 |
0 |
0~1 |
0:脉冲+方向 1:双脉冲 |
|
Pn013 |
脉冲输入边沿选择 |
0 |
0~1 |
0:上升沿,1:下降沿有效 |
|
Pn014 |
过载报警检测时间 |
10 |
0~65535 |
过载报警延迟设置 |
|
Pn015 |
位置超差圈数 |
5 |
0~65535 |
用于调节过载报警敏感度,实时误差超过设定值后将启动报警 |
|
Pn016 |
定位完成编码器线数 |
20 |
0~2500 |
到位精度 |
|
Pn017 |
最大速度限制 |
2000 |
200~3000 |
最大速度设定 |
|
Pn018 |
正转扭力限制 |
200 |
0~300 |
用于正转扭力限制 |
|
Pn019 |
反转扭力限制 |
200 |
0~300 |
用于反转扭力限制 |
|
Pn020 |
加速时间常数 |
0 |
0~65535 |
用于内部控制 |
|
Pn021 |
减速时间常数 |
0 |
0~65535 |
用于内部控制 |
|
Pn022 |
手动速度 |
200 |
1~3500 |
用于试运行 |
|
Pn023 |
控制方式 |
0 |
0~3 |
0:脉冲模式 1:IO速度 2:电位器速度 3:位置485 4:速度485 5:力矩485 |
|
Pn024 |
监控显示调节 |
0 |
0~11 |
上电默认界面。0:主界面。 1:转速。 2、3:编码器低、高位。 4、5:脉冲低、高位 。6、7:偏差脉冲低、高位。8:输入输 出I/O状态。9:母线电压。10:当前电角度。11:当前电机扭力 12: 泄放占空比 |
|
Pn025 |
485通讯波特率 |
3 |
1~6 |
1:4800 2:9600 3:19200 4:38400 5:57600 6:115200 |
|
Pn026 |
485通讯地址 |
1 |
1~255 |
用于通讯地址设置 |
|
Pn027 |
编码器电池报警 |
1 |
0~1 |
0:启用 1:不启用 |
|
Pn028 |
泄放占空比设置 |
95 |
0~150 |
用于泄放占空比设置 |
|
Pn029 |
OUT1输出功能 |
0 |
0~1 |
0:到位 1:Z信号 |
Copyright © 2020 宁波纳川科技 All Right Reserved 备案号:浙ICP备11033266号-1 技术支持:三个大师





